



2. 吉林大学控制科学与工程系, 吉林 长春 130025
2. Department of Control Science and Engineering, Jilin University, Changchun 130025, China
1 引言
随着汽车的普及,交通安全问题越来越凸显,传统的安全措施如安全带、 安全气囊等并不能有效地避免交通事故的发生,因此主动安全的概念慢慢形成并不断完善,如ABS(anti-lock braking system)、 ASR(acceleration slip regulation)、 ESP(electronic stability program)等都是主动安全技术[1]. 但这些安全技术都是根据驾驶员的决策来进行辅助的稳定控制操作,它们是作为执行层面上的稳定控制器,而没有自主决策能力. 显然,这种通过执行机构对驾驶员的错误决策进行补偿控制的方法可以提高车辆的行驶稳定性,但这种方法的控制能力是有限的,因此提出了能够从决策层面上代替驾驶员进行运动规划和控制的自主驾驶技术[2].
自主驾驶技术主要由环境感知系统和运动的决策控制系统组成[3]. 感知系统的任务是对传感设备采集到的数据信息进行分析和处理,从中提炼出行车的环境信息以及车辆行驶中的状态信息,而运动的决策控制系统则根据感知系统提供的环境信息和车辆的状态信息给出下一步行车计划,并控制车辆实现决策出的行车目标. 人类驾驶员是通过积累的驾驶经验来完成决策控制这一工作,而对于自主驾驶的车辆来讲,就需要依据人类驾驶行为和安全行车的需求来建立出相应的自主决策控制系统来代替人类的驾驶行为. 而对于自主驾驶车辆而言,其安全行车所面临的最大的危险则是行车环境中各种各样的交通障碍,故本文主要研究自主驾驶车辆的自主避障问题.
近年来,有不少学者对自主驾驶车辆的避障问题进行了研究. 文[4]中将自主车辆的避障问题转换成一种多目标的优化问题,从而决策出最优的行车轨迹. 文[5]则是根据预定义的路径点和障碍信息计算出一组可行轨迹,通过分析各个可行轨迹的安全成本、 光滑度及稳定性,决策出最优行车轨迹,实现实时的路径规划. 这两种方法都是在结合各种非完整约束的条件下,进行最优行车轨迹的规划的,具有一定的实用意义. 文[6]中提出危险区域这一概念,根据障碍物的相对速度计算出可能与障碍物发生碰撞的危险区域,并据此制定出能避开障碍的安全行车策略. 危险区域的定义给障碍的危险程度提供了一个判断标准,这对以后的避障研究具有很大的参考价值. 文[7]就是将障碍的危险程度作为改进的模糊控制器的输入信号来解决自主驾驶车辆的避障问题. 在根据当前车辆行车环境和行车状态做出相应的路径规划后,这些规划得到的信号需要通过执行层上的控制器转变为车辆可接受的控制信号来进行相应的动作,从而达到预期的行驶状态,近年来,也有不少文献对此做出了研究. 文[8]中提出了基于输入输出反馈线性化的横向位置控制方案,并将其应用到无人驾驶车的路径跟踪中,提高了横向跟踪的动态性能和稳态精度. 文[9]提出了基于预测误差的反馈控制模糊逻辑控制的实时路径规划和跟踪方法. 文[10, 11]则采用模型预测控制的方法解决路径跟踪的控制问题. 文[12]提出了基于微分平坦的预测控制方法以实现跟踪控制. 文[13]则是针对不同的行车状态分别采用模型预测控制方法和基于微分平坦的预测控制方法对车辆的前轮转角进行控制以实现路径跟踪控制. 这几种方法都是通过消除位置误差和航向误差来实现对期望路径的跟踪,则期望路径信息的获取成为制约跟踪效果的一个重要因素. 其中,文[13]提出期望路径预瞄点的概念来表示期望的路径信息,但文中并未阐明预瞄点信息的获取方法. 文[14]将natural actor-critic(NAC)和natural evolution strategy(NES)应用到无人车的路径跟踪控制中,通过实验验证其控制效果比传统的PID控制器要好. 文[15, 16]则基于滚动优化原理提出了一种类车机器人的路径跟踪控制策略. 这些方法是一种带约束曲线拟合的路径规划与跟踪控制方法,这类方法在实现对期望路径跟踪控制的同时,还满足非完整性约束和执行机构的约束条件.
对比分析上述几种自主避障策略可知,在运动规划的过程中都离不开对障碍的分析与判断,故本文提出一种基于人类驾驶行为的预测避障控制方案. 即首先根据人类的驾驶行为制定一种安全驾驶策略来实现避障的决策过程,然后结合预瞄点搜索的方法进行局部路径规划得到期望的侧向行驶位移ypr和期望的纵向行驶速度vx. 为使被控车辆能跟踪上期望的行驶轨迹,设计模型预测控制器对车辆进行转向控制. 同时,为使被控车辆获得期望的行驶速度,采用PID控制方法对车辆的纵向速度进行控制. 最后,进行离线仿真实验,并给出仿真结果与分析.
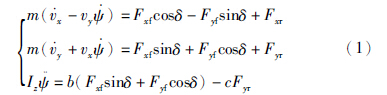
2 车辆模型根据所考虑的影响因素的不同,车辆动力学模型可以有很多种,车辆“自行车”模型是在忽略了空气动力学、 车辆悬架系统、 转向系统基础上,将前后轮分别用一个等效的前轮和一个等效的后轮来代替而得到的车辆动力学模型,如图 1所示,其数学表达式如式(1)所示:
 |
| 图 1 车辆“自行车”模型Fig. 1 The bicycle vehicle model |
| m | 车辆质量 |
| Iz | 车身绕Z轴的转动惯量 |
| vx | 纵向速度 |
| vy | 侧向速度 |
 | 横摆角速度 |
| δ | 前轮转角 |
| Fxf | 前轮纵向轮胎力 |
| Fyf | 前轮侧向轮胎力 |
| Fxr | 后轮纵向轮胎力 |
| Fyr | 后轮侧向轮胎力 |
| b | 质心到前轴距离 |
| c | 质心到后轴轴距 |
车辆在无急弯的道路上行驶时,处于稳定工况,其前轮转角δ1. 对于自主车辆的转向控制,本文采用基于模型的预测控制(MPC)方法. 预测时域与整个行驶过程相比是极短的,且本文对车辆纵向速度的控制是由独立的PID控制器完成的,所以,在对车辆进行转向控制时,认为车辆的纵向速度在每一个预测时域内保持恒定. 从而可将式(1)进一步简化,得到车辆的二自由度模型,如式(2)所示:

由于车辆在行驶中处于稳定状态,轮胎侧向力可用式(3)来进行近似计算:



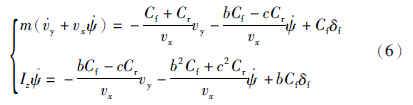
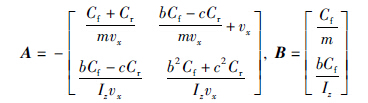
]为系统的状态变量,以前轮转角δf为系统的输入,此时可得到车辆二自由度模型的线性状态方程表达式如式(7)所示:

自主驾驶技术就是需要在保证车辆行驶的稳定性和安全性的前提下,能代替人类驾驶员根据当前行车环境和车辆状态信息自主做出运动规划,并通过设计相应的控制器控制车辆执行器进行相应的动作,以实现期望的行驶目标. 为满足自主驾驶技术的需求,首先采用预瞄点搜索算法参照人类的驾驶行为设计出自主决策系统,然后分别设计出控制车辆转向的MPC控制器和控制纵向速度的PID控制器. 系统整体框图如图 2所示.
 |
| 图 2 避障控制系统框图Fig. 2 Block diagram of the obstacle-avoidance control system |
车辆在公路上行驶时,其周围的环境并不是静态的,而是时时变化的,在这种环境中进行驾驶,会遇到各种各样的交通状况. 考虑到自主驾驶车辆行驶安全性,这就需要车载的智能控制装置不仅能控制车辆进行路径的跟踪行驶,还要能代替驾驶人员做出合理化的驾驶决策,规划出一条安全的行驶路径,以面对各色各样突如其来的交通状况,从而保证车辆行驶的安全性. 而人们驾驶车辆在动态的道路环境中行驶时,最常发生的事故是车辆追尾,这就使得我们在设计车辆自主控制装置时不能只采用单一的巡航控制算法,还需要考虑到怎样去主动避开车辆前方的障碍物,以保证行驶时的安全. 通常情况下,驾驶员会采用以下两种方法来进行障碍物的躲避: (1) 踩下刹车进行制动,以免撞到前方的障碍,尽可能地减少生命财产损失. (2) 通过转动方向盘控制车辆到超车道行驶并在避开障碍后回到原车道继续行驶. 故为了应对动态道路环境中各色各样的路面交通状况,车载的智能控制系统需要在不同的状况下能正确决策出应采用巡航、 制动及超车与并线这4种控制算法中的哪一种.
(1) 巡航
通常来说,在车辆前方没有可见的障碍物时,车辆就比较安全,此时车辆应能以期望的速度沿着行车道道路中心线进行路径跟踪运动.
(2) 超车和并线
车辆在公路上行驶时,难免会遇到前方有车辆行驶速度较慢的情况,这时若超车道中无可见障碍,我们应采取措施控制车辆保持当前车速驶入超车道,在超车道中加速到一定速度后再恒速进行路径跟踪运动,该过程就是超车运动,而当车辆超出障碍车辆一定距离后必然要回到行车道进行跟踪行驶,这时就得控制车辆保持恒速驶回行车道,此过程就是在进行并线操作,故超车和并线是两个不可分割的操作. 车辆在变换车道时,为保证车辆的稳定性,一定要保持车速恒定. 下面以曲线道路为例来具体说明并线过程的轨迹规划方法,如图 3所示. 超车时变换车道的过程其实是并线运动的反操作,故它们的轨迹规划原理是一样的. 图 3中的两条平行的实线分别为行车道和超车道的道路中心线,小虚线为车辆驶入行车道时的实际行驶路径,大虚线则为下一时刻的搜索路径,两条虚线的交点A为下一时刻车辆的期望位置,d则为在当前车身坐标系下的搜索路径与行车道中心线的垂直间距,为保证车辆行驶时的侧向稳定,取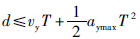 ,其中aymax=0.4g.
,其中aymax=0.4g.
 |
| 图 3 车道变换时的行车路径Fig. 3 The driving trajectory when changing the lane |
(3) 制动
行驶中的车辆在遇到障碍时应首先采取超车的方法来进行避障,但若无法进行超车,如附近的超车道有车辆在进行超车行驶,此时就需要踩踏制动踏板来进行减速,使行车车速与前方障碍车辆的车速保持一致,以免两者相撞,从而保证行车的安全性.
国家交通安全法规定,驾驶小型载客汽车在高速公路上时速低于100 km/h的最小车距不得小于50 m,本文以该距离作为车辆行驶的最小安全距离,即当两车的间距小于50 m时,车辆处于不安全的状态,反之车辆处于安全的状态. 结合人类这4种典型的驾驶行为,本文提出了一种针对在双车道的高速公路环境下行驶时的安全驾驶策略,如图 4所示.
 |
| 图 4 安全驾驶策略Fig. 4 Safe-driving strategy |
在给定路径点信息的情况下,文[13]中采用跟踪期望路径预瞄点方法实现对期望路径的跟踪,但文中并未给出预瞄点信息的获取方法,本文在此概念的基础上设计出基于线性插值的预瞄点二次搜索算法. 结合当前的位置和方向信息,该搜索算法可以实时地从给定的路径点中选取出未来某一时刻期望的位置信息,具体过程如图 5所示.
 |
| 图 5 预瞄点搜索算法Fig. 5 Preview point search algorithm |
针对图 5来讲,预瞄点搜索算法的一个基本用途就是根据车辆当前位置信息计算出预瞄点P的相关信息. 该搜索过程可以看成是通过以下两步完成的: 一是先从已知的道路中心线的点序列中找寻到距离被控车辆当前位置最近的一个位于其后方的点S,并将该点的信息存储下来,作为下一次搜索的起始点; 第二步是计算出预瞄点P在当前车身坐标系下的纵坐标,即为图 5中的yP,计算过程如下: 首先在给定预瞄点序列中找到将预瞄点P夹在中间的两个最近点M和M1,然后采用线性插值的方法计算出预瞄点P的纵坐标.
3.3 MPC控制器设计对车辆前轮转角进行控制的目的主要是控制车辆的侧向运动,使得被控车辆实际的侧向位移能跟踪上期望的侧向位移,故本文取车辆的侧向位移作为控制系统的输出,即令yc=y. 传统上,侧向行驶位移大都取为yc=∫vydt(如文[13]中系统输出的求解方法),但采用这种方法所设计的MPC控制器,由于系统输出与系统的状态是积分的关系,其优化求解过程需在线进行,此时控制器的运算周期较长. 而汽车的ECU(electronic control unit)是快变的,对控制器的计算速度的要求非常高,所以,这种取yc=∫vydt的方法并不为本文所采用.
考虑到预测时域与整个换道时间相比是极其短暂的,本文将车辆在每一个预测时域T内的侧向运动视为匀加速运动,则有式(8)

又可知车辆质心的侧向加速度ay可由式(9)求得:

结合式(8)和式(9)整理可得式(10):

结合式(7)和式(11)整理可得车辆运动状态的表达式如式(12)所示:


 为减少静差,引入增量模型如式(14)所示:
为减少静差,引入增量模型如式(14)所示:

根据模型预测控制的基本理念,取预测时域为p,控制时域为m≤p. 在k时刻定义系统的输出为


由于控制器要实现的目标是让被控输出能跟踪上期望的侧向位移,故取期望的侧向位移ypr为控制系统的参考输入,即

式(11)表明,该控制系统的输出变量中含有控制量u,因此该控制系统并非传统形式的预测控制系统. 但基于此设计的MPC控制器的p步预测方程,如式(17)所示,与传统预测控制器的预测方程的形式是一样的. 所以,该控制系统仍可采用求解传统预测控制问题的方法对上述优化问题进行求解. 本文采用文[17]中求解开环优化解的方法,求得k时刻的最优控制序列为

 . 根据预测控制的基本原理,将开环最优控制序列的第一个元素作用于系统,即
. 根据预测控制的基本原理,将开环最优控制序列的第一个元素作用于系统,即

在新的时刻,被控车辆的状态也会进行更新,重新计算得到最优的控制输入,然后作用于被控对象,如此往复,即实现了对车辆的转向控制.
由式(23)可知,本文所设计的MPC控制器,其优化解可直接通过离线计算求得,此时大大缩短了控制器的运算周期. 故与取yc=∫vydt的方法相比,本文提出的这种基于运动学公式的侧向位移的求解方法,简化了MPC控制器的优化求解过程,进而提高了系统的运算速度,使设计的控制器更加符合车辆ECU对计算时间的要求.
3.4 PID控制器设计为使车辆能获得期望的行驶速度,本文采用PID控制方法对车辆的纵向速度进行控制,其控制律为

选取期望速度vr与实际行驶速度vxt的偏差Δvx作为控制器的输入,控制器的输出为作用于车轮上的总力矩T,则有:

又知,T为作用于车轮上的驱动力矩Tt与制动力矩Tb的总和. 根据车辆的运动学和动力学特性,本文对T进行分配,得到相应的驱动和制动力矩,进而实现对纵向速度的控制. 其中,所采用的分配策略为: 当vr≥vxt时,令驱动力矩Tt=T,而当vr<vxt时,令制动力矩Tb=T.
4 仿真结果为验证本文提出的自主决策避障控制算法的有效性,将基于红旗HQ3搭建的14自由度的车辆系统作为被控对象,分别在干燥的沥青道路和潮湿的沥青道路上进行仿真实验,实验选取如图 6所示的环形道路.
 |
| 图 6 实验道路Fig. 6 The road used in the experiment |
设被控车辆的纵向行驶速度为vx=25 m/s,其初始位置为Xo=665,Yo=-0.6,同时在其前方X1=765,Y1=-0.6处有一车辆以20 m/s的速度在行驶着,在其后方的超车道中X2=605,Y2=3.15处也有一车辆以30 m/s的速度在行驶着. 仿真结果如图 7所示,其中图 7(a)为被控车辆在超车和并线过程中各自的行进路线,图 7(b)为MPC控制器的控制输入即前轮转角δf的曲线图,图 7(c)~7(f)给出了被控车辆在仿真过程中的纵向速度vx、 侧向速度vy、 侧向加速度ay以及横摆角速度的曲线图.
 |
| 图 7 在干燥沥青路面(μ=0.8)工况下的仿真结果Fig. 7 Result in dry asphalt-pavement simulation(μ=0.8) |
从图 7(a)和图 7(c)可以看出被控车辆在行驶一段时间后,与其前方车辆的纵向距离小于安全距离,但此时探测到超车道中有一台障碍车辆在行驶,故被控车辆采取制动操作,将车速降低到20 m/s,然后保持该车速继续巡航运动直到超车道中的障碍车辆消失,然后保持当前速度驶进超车道开始进行超车运动,为了快速超车,被控车辆在超车道中加速到28 m/s后开始进行定速巡航运动,当被控车辆在超出行车道中障碍车辆的距离大于安全行驶距离后开始恒速并线回行车道,回到行车道后则恢复到其初始的行驶状态,即保持25 m/s的速度进行路径跟踪运动. 从图 7(e)和图 7(f)可以看出被控车辆行驶时的侧向加速度ay≤0.4g且其横摆角速度较小,说明被控车辆在行驶过程中处于安全稳定状态.
为进一步验证控制器的效果,在μ=0.5的潮湿沥青路面上进行同样的仿真实验,仿真结果如图 8所示,其中图 8(a)为被控车辆在超车和并线过程中各自的行进路线,图 8(b)为MPC控制器的控制输入即前轮转角δf的曲线图,图 8(c)~8(f)给出了被控车辆在仿真过程中的纵向速度vx,侧向速度vy,侧向加速度ay以及横摆角速度的曲线图.
 |
| 图 8 在潮湿沥青路面(μ=0.5)工况下的仿真结果Fig. 8 Result in wet asphalt-pavement simulation(μ=0.5) |
由图 8(a)和8(c)可以看出,在潮湿的沥青路面上行驶的过程中,被控车辆在遇到障碍时也能进行制动减速、 超车以及并线运动,从而实现避障的目的,这说明该决策控制系统具有较好的适用性. 而且图 8(e)和图 8(f)显示被控车辆行驶时的侧向加速度ay≤0.4g且其横摆角速度较小,说明被控车辆在行驶过程中处于安全稳定状态.
对比两种道路工况下的仿真结果,可以看出该自主决策控制系统在干燥的沥青路面上具有更好的控制效果,图 7和图 8(b)~8(f)显示,被控车辆在换道行驶时控制器输出的方向盘转角δf以及其侧向加速度ay、 侧向速度vy和横摆角速度都会有一些小的波动,而造成这些波动的根本原因是车辆换道行驶的轨迹是由一系列相对于当前时刻的侧向位移偏差组成的,但总的来看,控制器的效果是满足安全性要求的.
针对自主驾驶车辆的避障问题,提出一种基于人类驾驶行为的预测避障控制方案. 结合制定的安全驾驶策略和预瞄点搜索算法在Matlab/Simulink中建立了运动规划模块,并设计搭建了MPC控制器和PID控制器的算法模型. 采用高精度的车辆系统作为被控对象进行仿真实验,结果表明,本文提出的避障控制方案使车辆具有良好的自主避障性能. 但本文的避障控制系统是针对高速公路环境设计的,而城市道路的交通环境要更加复杂,所以安全驾驶策略还需要被进一步完善. 而且车辆在实际行驶时,其侧向位移和纵向速度无法由测量精确得到,对它们采用观测的方法,进行观测器的设计也还需进一步的研究.
| [1] | 王兴祥. 汽车安全技术的研究现状及展望[J]. 科协论坛,2013(6): 60-61. Wang X X. Research status and prospects of automotive safety technology[J]. Science & Technology Association Forum,2013(6): 60-61. |
| [2] | Hahn S. Automation of driving functions-future development,benefits and pitfalls[C] //1996 IEEE Intelligent Vehicles Symposium. Piscataway,NJ,USA: IEEE,1996: 309-312. |
| [3] | 丛岩峰. 高速公路环境中自主驾驶车辆运动规划与控制[D]. 长春: 吉林大学,2011. Cong Y F. Motion planning and control for autonomous vehicle driving on motorways[D]. Changchun: Jilin University,2011. |
| [4] | Tomas-Gabarron J B,Egea-Lopez E,Garcia-Haro J. Vehicular trajectory optimization for cooperative collision avoidance at high speeds[J]. IEEE Transactions on Intelligent Transportation Systems,2012,14(4): 1930-1941. |
| [5] | Chu K,Lee M,Sunwoo M. Local path planning for off-road autonomous driving with avoidance of static obstacles[J]. IEEE Transactions on Intelligent Transportation Systems,2012,13(4): 1599-1616. |
| [6] | Wang T C,Lin T J. Unmanned vehicle obstacle detection and avoidance using danger zone approach[J]. Transactions of the Canadian Society for Mechanical Engineering,2013,37(3): 529-538. |
| [7] | Lu Y Q,Qiu F J,Xin J H,et al. Dynamic obstacle avoidance for path planning and control on intelligent vehicle based on the risk of collision[J]. WSEAS Transaction on Systems,2013,12(3): 154-164. |
| [8] | 刘子龙. 基于反馈线性化的无人驾驶车辆横向位置跟踪控制[J]. 系统工程与电子技术,2009,31(1): 165-169. Liu Z L. Lateral position tracking control of unpiloted vehicle based on feedback linearization[J]. Systems Engineering and Electronics,2009,31(1): 165-169. |
| [9] | 尹晓丽,李雷,贾新春. 无人驾驶汽车路径跟踪模糊预测控制[J]. 中北大学学报: 自然科学版,2011,32(2): 135-138. Yin X L,Li L,Jia X C. Predictive fuzzy control of unmanned vehicle path tracking[J]. Journal of North University of China: Natural Science Edition,2011,32(2): 135-138. |
| [10] | Yu S Y,Li X,Chen H,et al. Nonlinear model predictive control for path following problems[J]. International Journal of Robust and Nonlinear Control,2013,34(3): 329-336. |
| [11] | Raffo G V,Gomes G K,Normey-Rico J E,et al. A predictive controller for autonomous vehicle path tracking[J]. IEEE Transactions on Intelligent Transportation Systems,2009,10(1): 92-102. |
| [12] | 丛岩峰,陈虹,Sawondny O,等. 车辆高速公路环境下基于微分平坦的紧急避障预测控制[C] //中国自动化学会控制理论专业委员会D卷. 北京: 中国自动化学会,2011: 1135-1140. Cong Y F,Chen H,Sawondny O,et al. Model predictive control for vehicle emergency motion planning based-on flatness[C] //Technical Committee on Control Theory,Chinese Association of Automation: Vol D. Beijing: Chinese Association of Automation,2011: 1135-1140. |
| [13] | 喻再涛. 高速公路环境中基于预测控制的自主车辆避障控制[D]. 长春: 吉林大学,2012. Yu Z T. Obstacle avoidance for autonomous vehicle driving on highways based on MPC[D]. Changchun: Jilin University,2012. |
| [14] | Kwon K Y,Jung K W,Yang D S,et al. Autonomous vehicle path tracking based on natural gradient methods[J]. JACⅢ,2012,16(7): 888-893. |
| [15] | 马东扬. 基于滚动优化的轮式移动机器人轨迹规划[D]. 长春: 吉林大学,2009. Ma D Y. The trajectory planning of wheeled mobile robot based on moving horizon optimization[D]. Changchun: Jilin University,2009. |
| [16] | 丛岩峰,安向京,陈虹,等. 基于滚动优化原理的类车机器人路径跟踪控制[J]. 吉林大学学报:工学版,2012,42(1): 182-187. Cong Y F,An X J,Chen H,et al. Path following control of car-like robot based on rolling windows[J]. Journal of Jilin University: Engineering and Technology Edition,2012,42(1): 182-187. |
| [17] | 陈虹. 模型预测控制[M]. 北京: 科学出版社,2013: 13-30. Chen H. Model predictive control[M]. Beijing: Science Press,2013: 13-30. |